Projects
Selected international journal and conference projects with dedicated webpages.
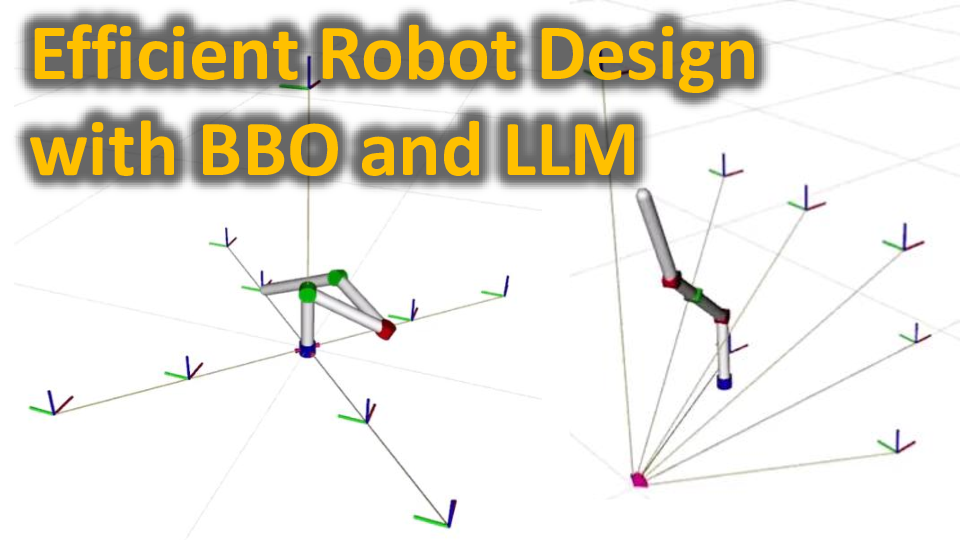
Efficient Robot Design with Multi-Objective Black-Box Optimization and Large Language Models
K. Kawaharazuka and Y. Obinata and N. Kanazawa and H. Jia and K. Okada
IEEE Access, 2026
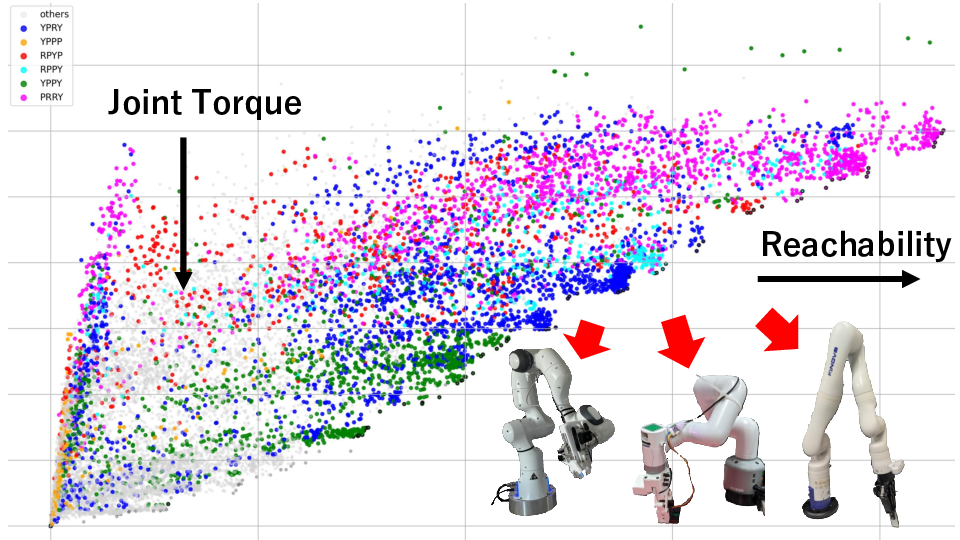
Analysis of Various Manipulator Configurations Based on Multi-Objective Black-Box Optimization
K. Kawaharazuka and K. Yoneda and T. Hattori and S. Inoue and K. Okada
Advanced Robotics (AR), 2026
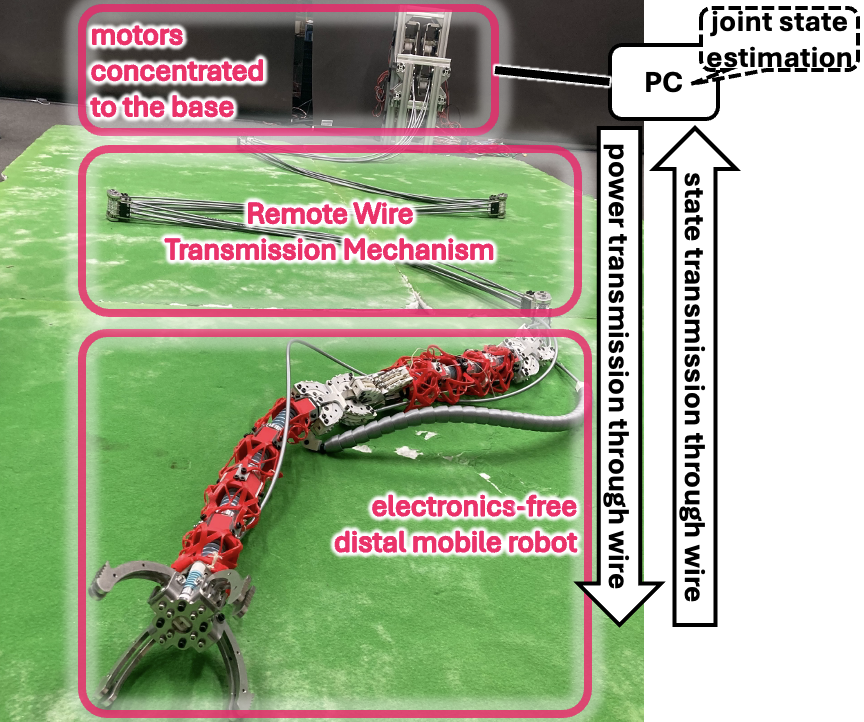
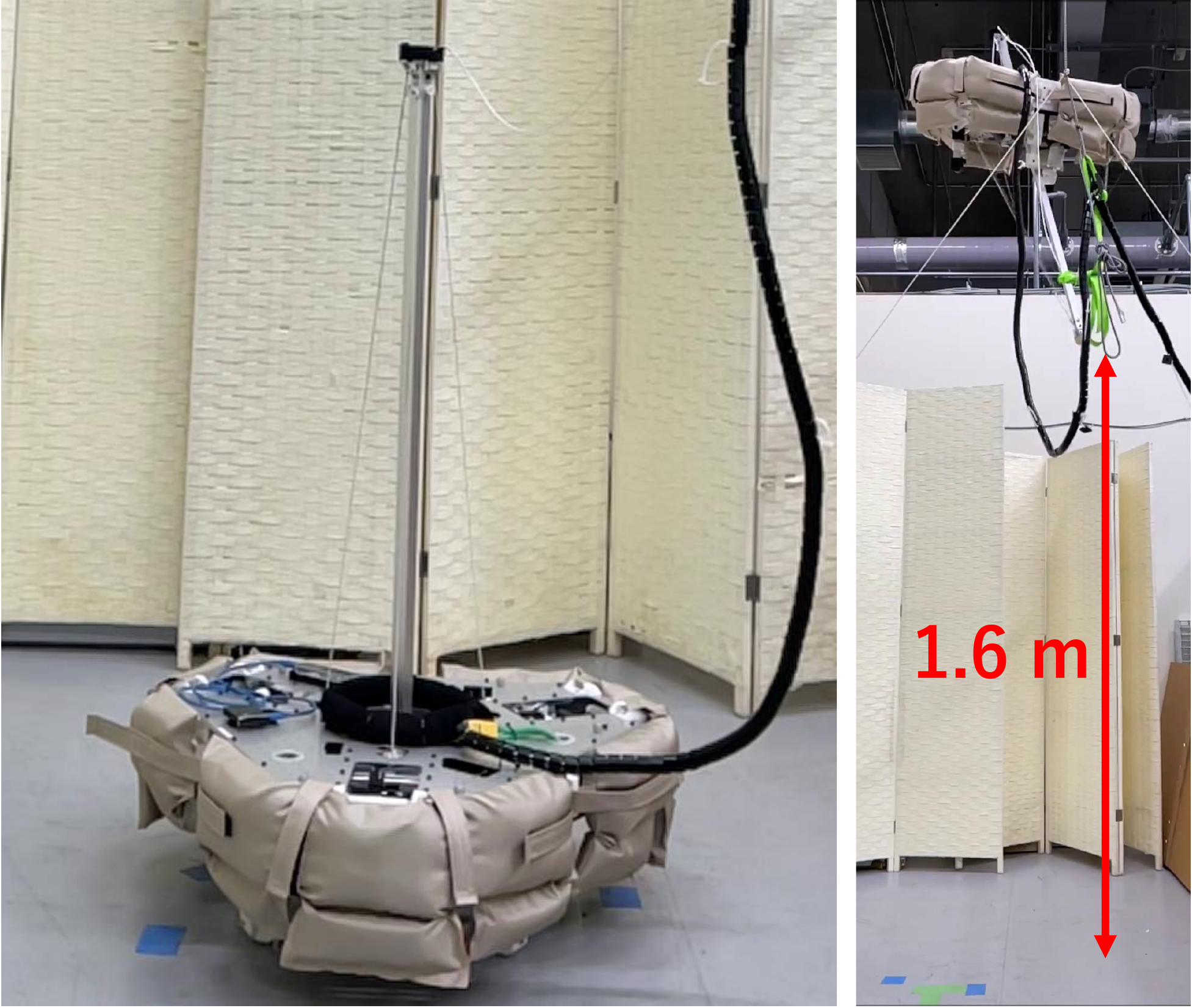
REWW-ARM - Remote Wire-Driven Mobile Robot: Design, Control, and Experimental Validation
T. Hattori and K. Kawaharazuka and T. Suzuki and K. Yoneda and K. Okada
Advanced Intelligent Systems (AISY), 2025
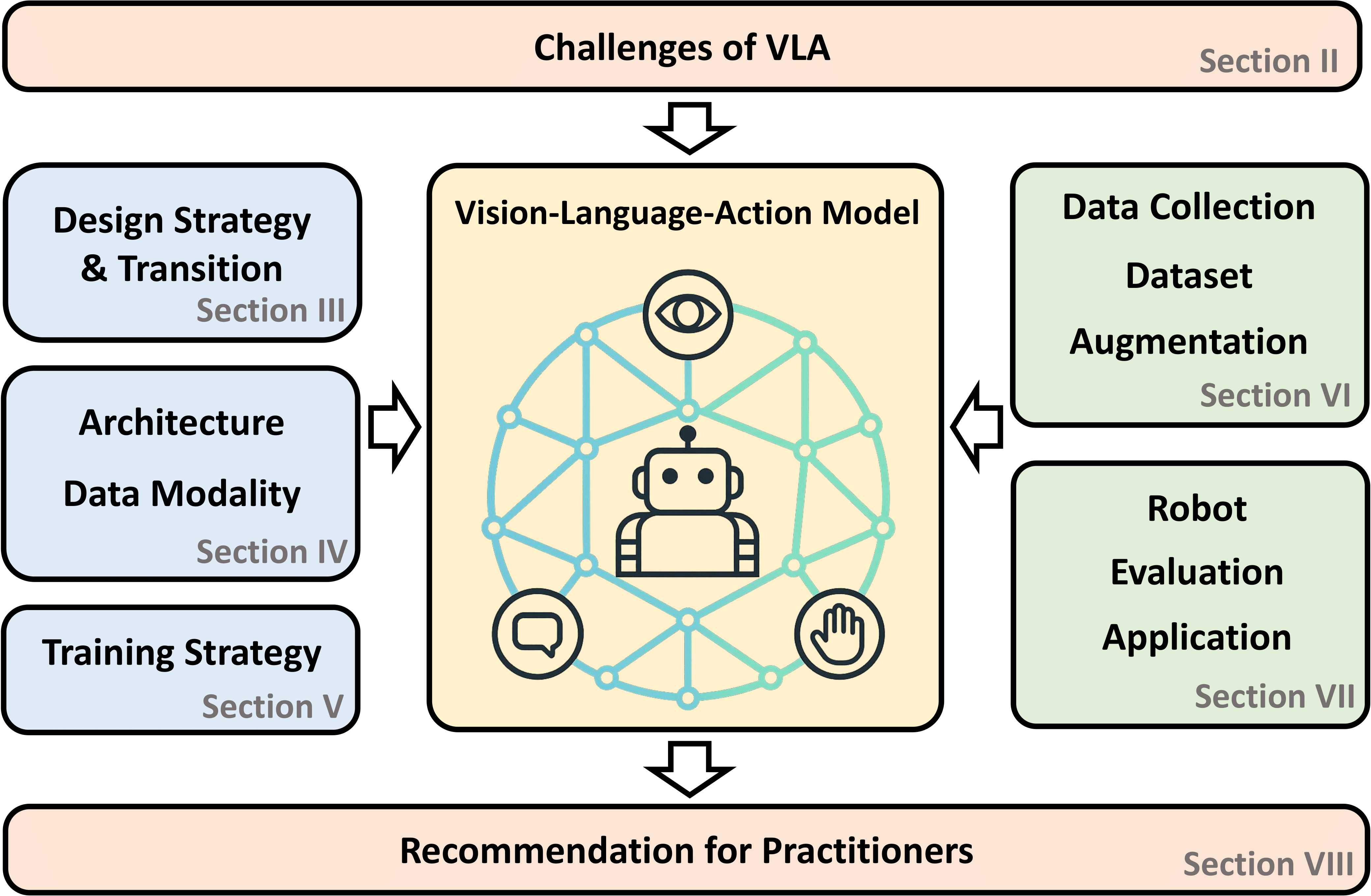
Vision-Language-Action Models for Robotics: A Review Towards Real-World Applications
K. Kawaharazuka and J. Oh and J. Yamada and I. Posner and Y. Zhu
IEEE Access, 2025
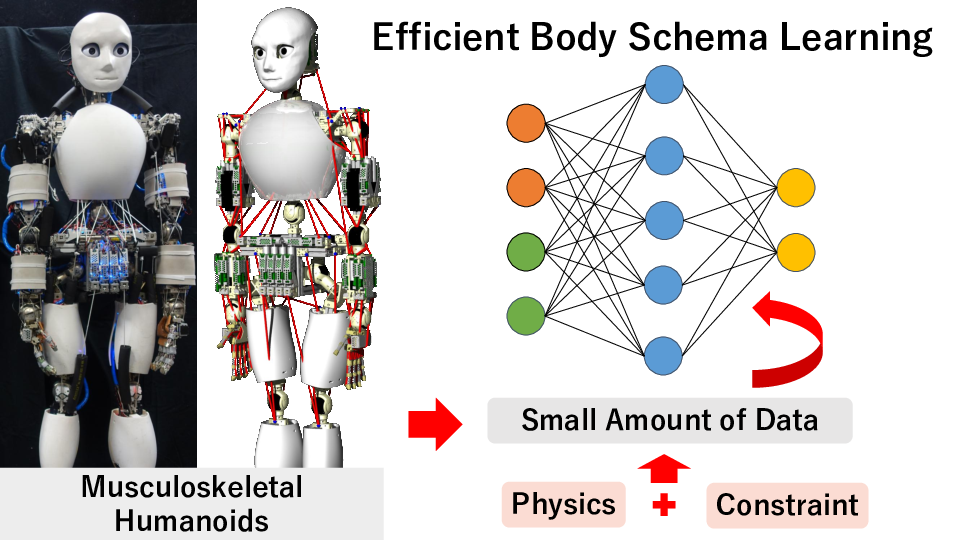
PIMBS: Efficient Body Schema Learning for Musculoskeletal Humanoids with Physics-Informed Neural Networks
K. Kawaharazuka and T. Hattori and K. Yoneda and K. Okada
IEEE Robotics and Automation Letters (RAL), 2025
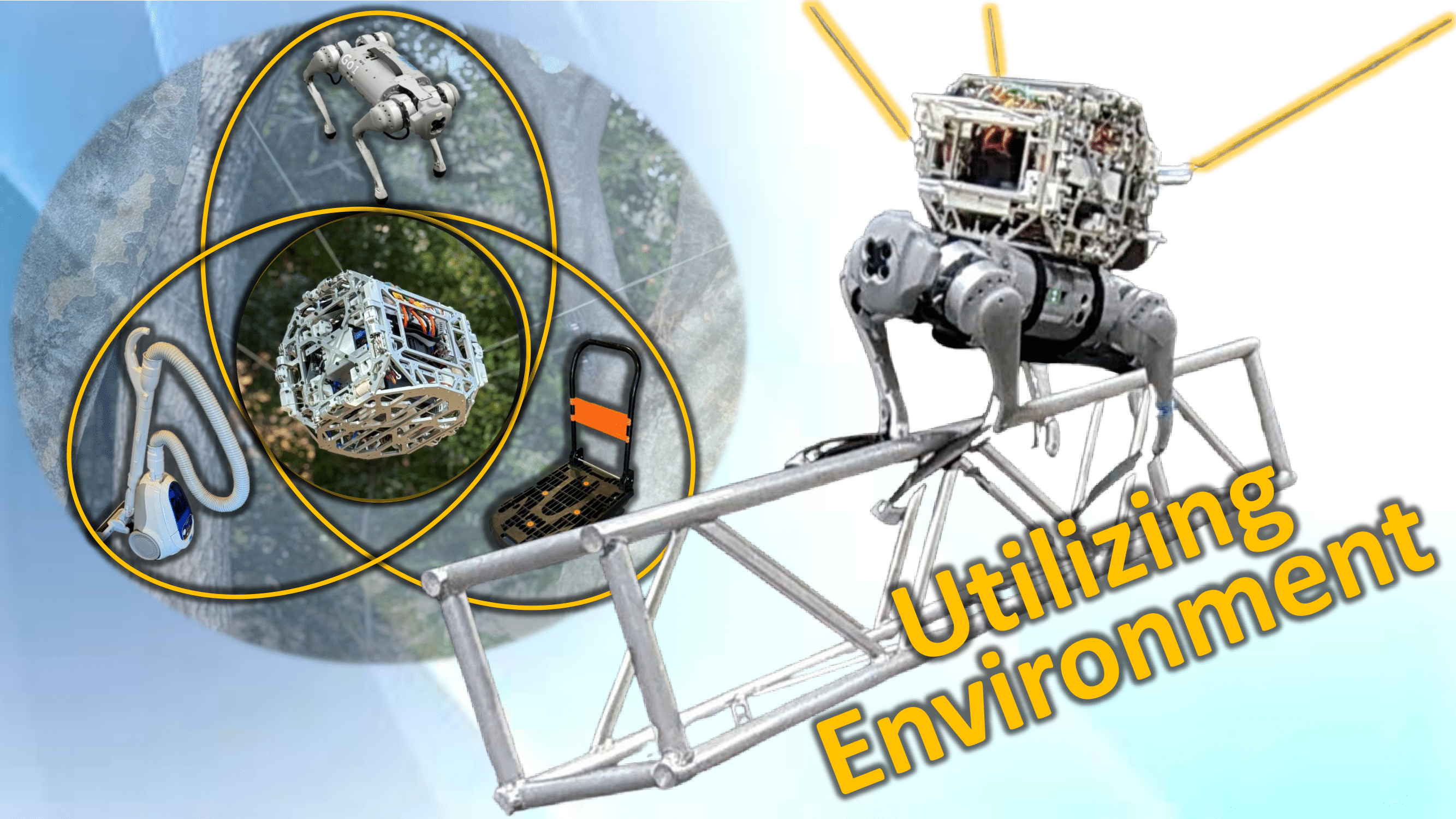
Overcoming Physical Limitations Utilizing the Surrounding Environment with a Wire-Driven Multipurpose Robot
S. Inoue and K. Kawaharazuka and T. Suzuki and S. Yuzaki and K. Okada and M. Inaba
Advanced Robotics Research (ADRR), 2025
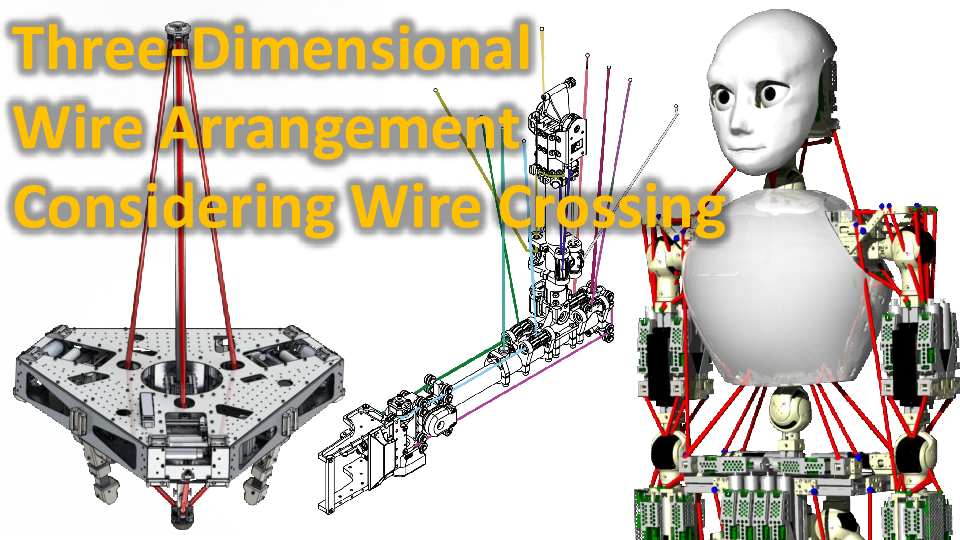
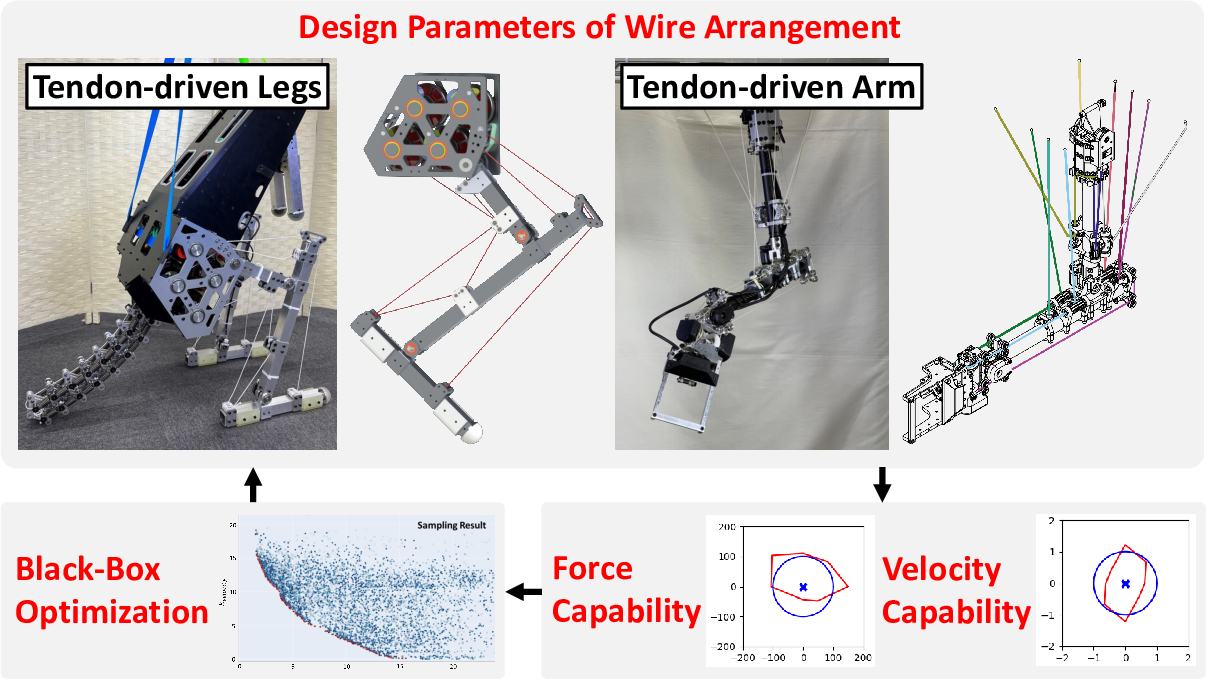
Design Optimization of Three-Dimensional Wire Arrangement Considering Wire Crossings for Tendon-driven Robots
K. Kawaharazuka and S. Inoue and Y. Sahara and K. Yoneda and T. Suzuki and K. Okada
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2025), 2025

KLEIYN : A Quadruped Robot with an Active Waist for Both Locomotion and Wall Climbing
K. Yoneda and K. Kawaharazuka and T. Suzuki and T. Hattori and K. Okada
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2025), 2025

An RGB-D Camera-Based Multi-Small Flying Anchors Control for Wire-Driven Robots Connecting to the Environment
S. Inoue and K. Kawaharazuka and K. Yoneda and S. Yuzaki and Y. Sahara and T. Suzuki and K. Okada
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2025), 2025
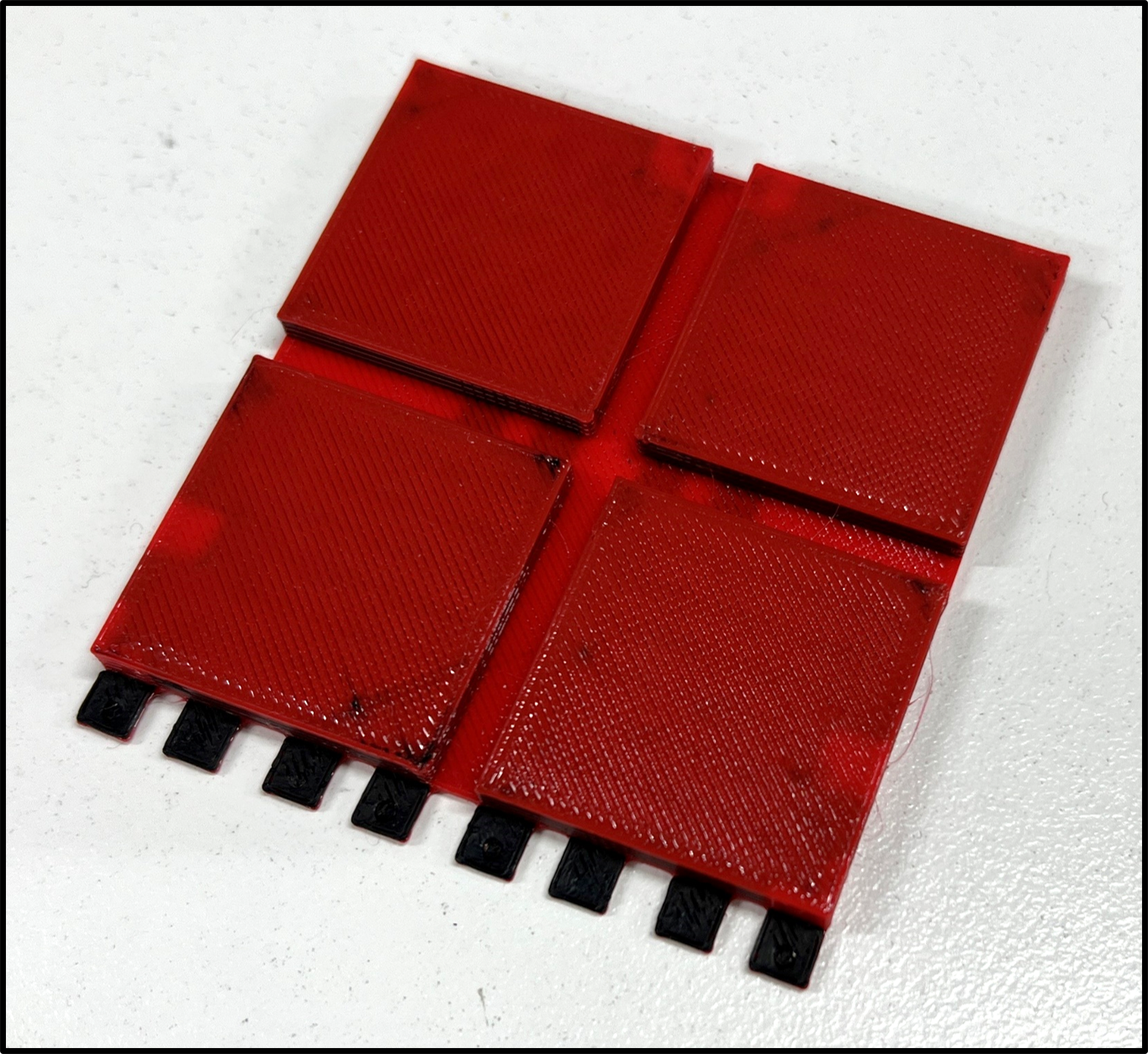
M3D-skin: Multi-material 3D-printed Tactile Sensor with Hierarchical Infill Structures for Pressure Sensing
S. Yoshimura and K. Kawaharazuka and K. Okada
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2025), 2025

MEVITA: Open-Source Bipedal Robot Assembled from E-Commerce Components via Sheet Metal Welding
K. Kawaharazuka and S. Sawaguchi and A. Iwata and K. Yoneda and T. Suzuki and K. Okada
2025 IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS2025), 2025
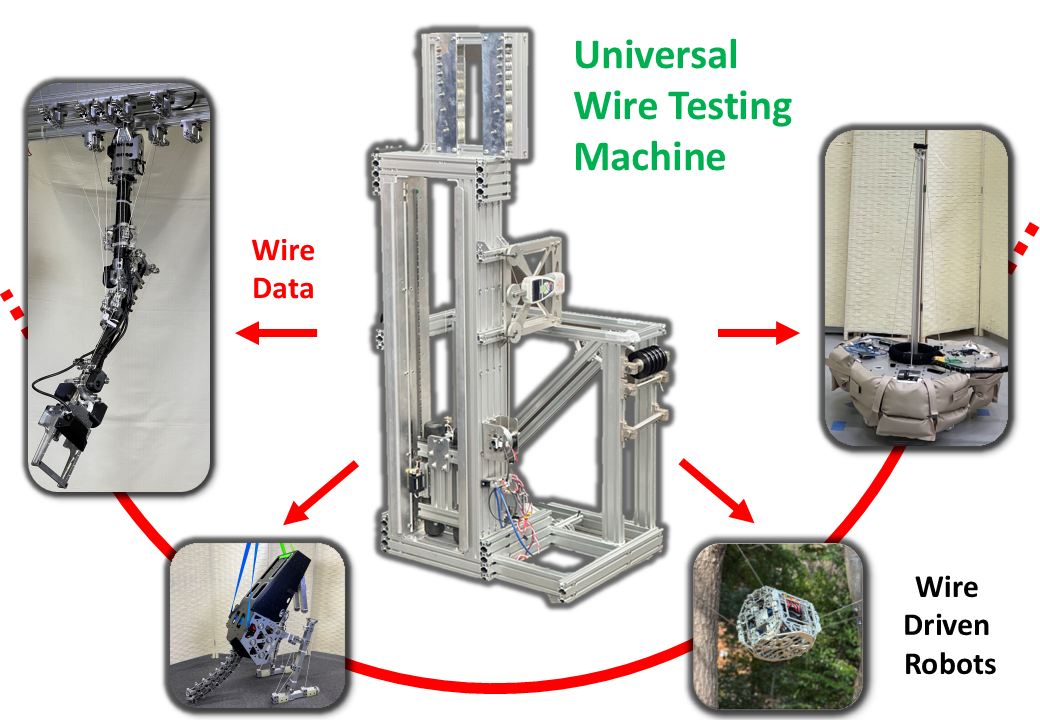
A Universal Wire Testing Machine for Enhancing the Performance of Wire-Driven Robots
T. Suzuki and K. Kawaharazuka and K. Okada
2025 IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS2025), 2025
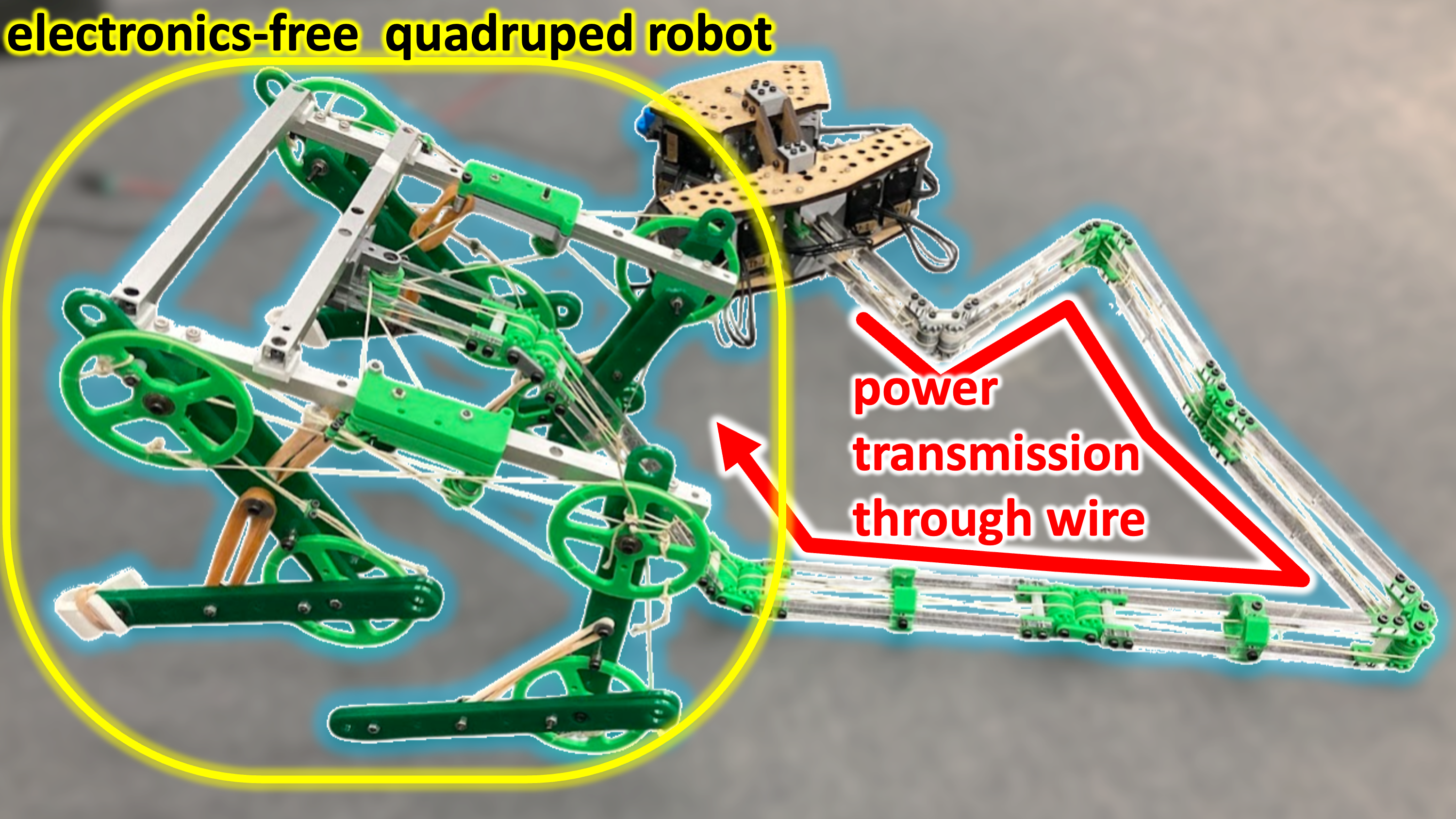
Design and Development of a Remotely Wire-Driven Walking Robot
T. Hattori and K. Kawaharazuka and K. Okada
2025 IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS2025), 2025
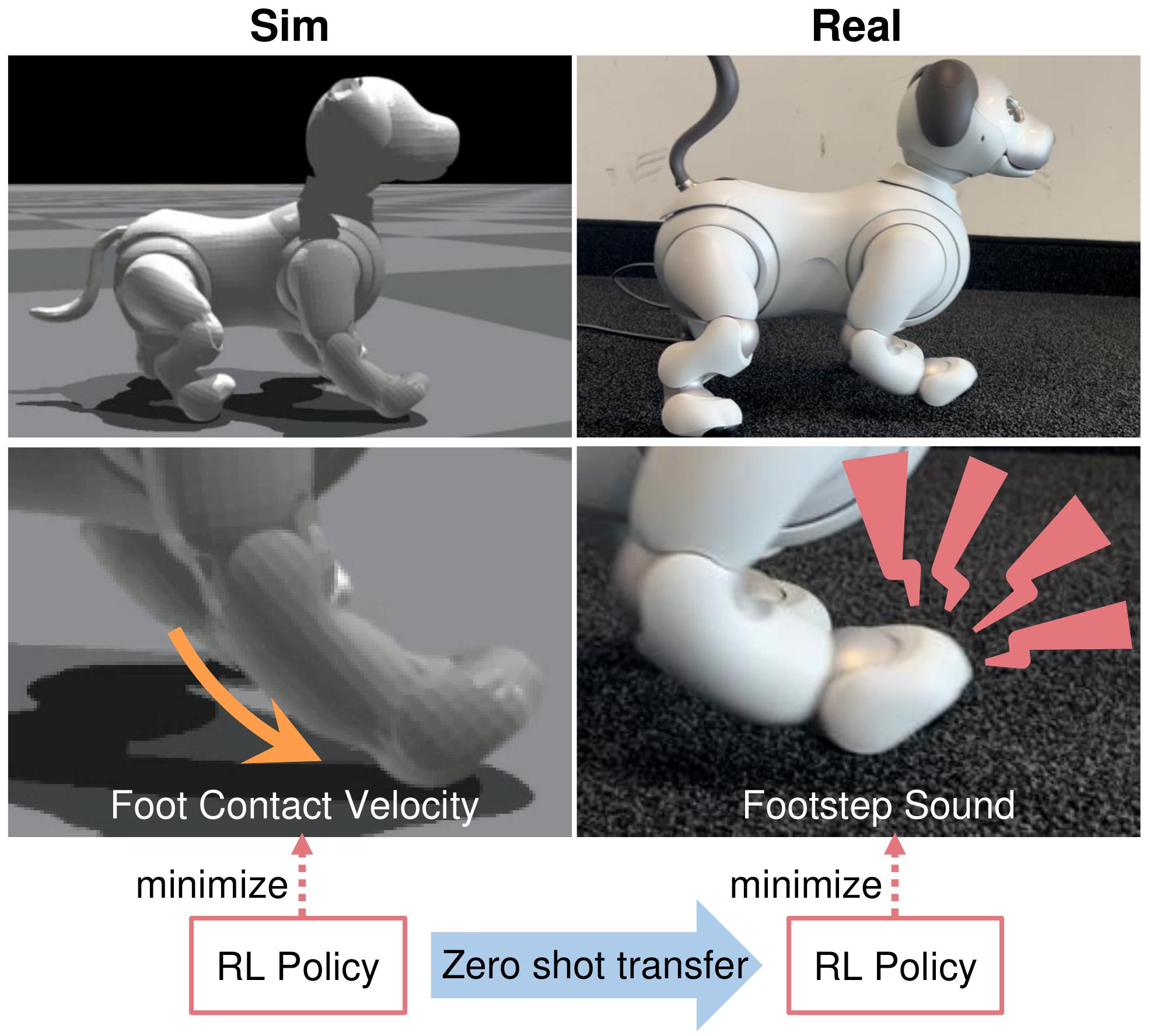
Learning Quiet Walking for a Small Home Robot
R. Watanabe and T. Miki and F. Shi and Y. Kadokawa and F. Bjelonic and K. Kawaharazuka and A. Cramariuc and M. Hutter
2025 IEEE International Conference on Robotics and Automation (ICRA2025), 2025
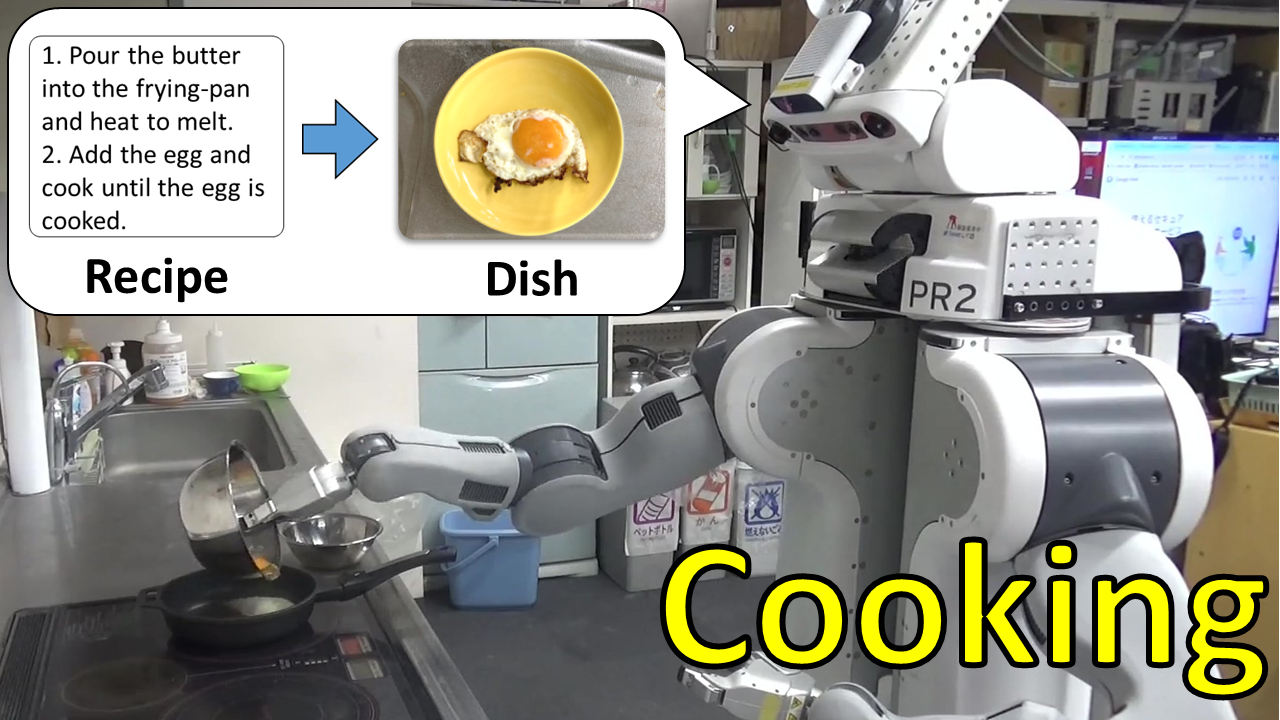
Real-world cooking robot system from recipes based on food state recognition using foundation models and PDDL
N. Kanazawa and K. Kawaharazuka and Y. Obinata and K. Okada and M. Inaba
Advanced Robotics (AR), 2024
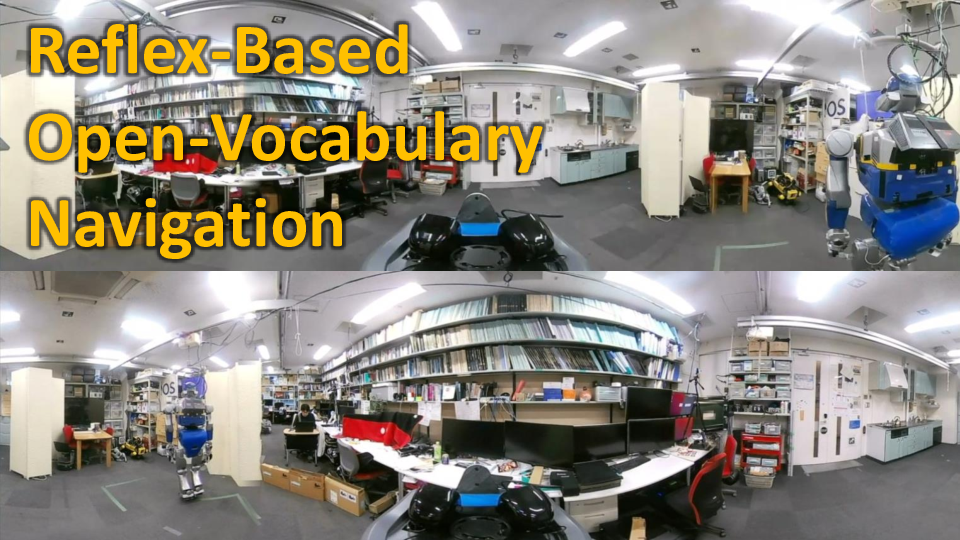
Reflex-Based Open-Vocabulary Navigation without Prior Knowledge Using Omnidirectional Camera and Multiple Vision-Language Models
K. Kawaharazuka and Y. Obinata and N. Kanazawa and N. Tsukamoto and K. Okada and M. Inaba
Advanced Robotics (AR), 2024
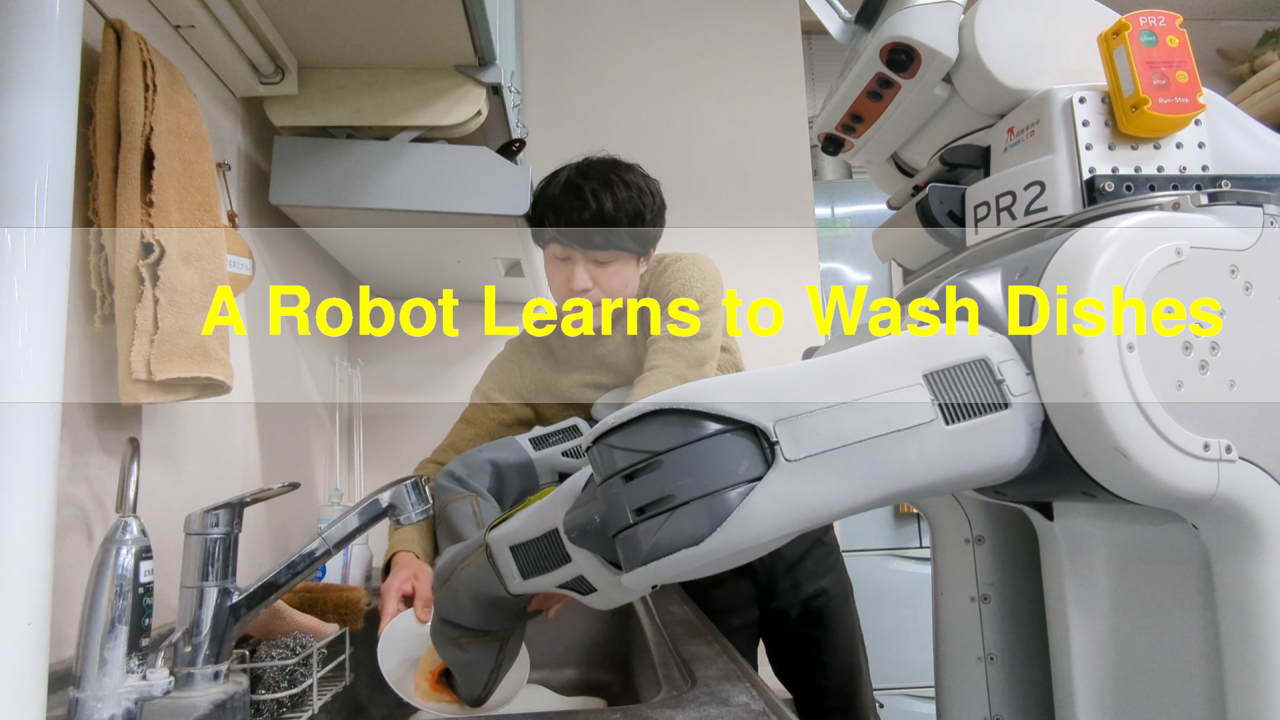
Behavioral Learning of Dish Rinsing and Scrubbing based on Interruptive Direct Teaching Considering Assistance Rate
S. Wakabayashi and K. Kawaharazuka and K. Okada and M. Inaba
Advanced Robotics (AR), 2024

Robotic Environmental State Recognition with Pre-Trained Vision-Language Models and Black-Box Optimization
K. Kawaharazuka and Y. Obinata and N. Kanazawa and K. Okada and M. Inaba
Advanced Robotics (AR), 2024
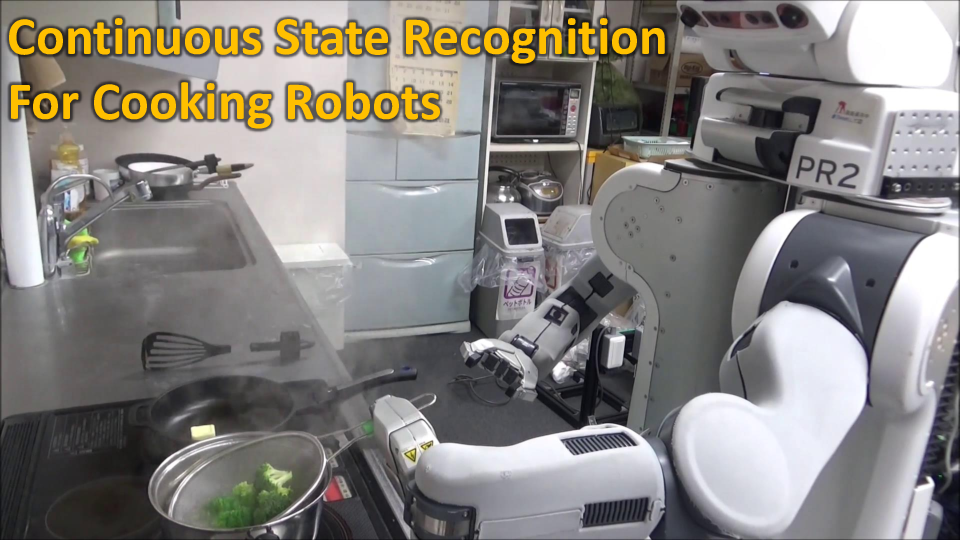
Continuous Object State Recognition for Cooking Robots Using Pre-Trained Vision-Language Models and Black-box Optimization
K. Kawaharazuka and N. Kanazawa and Y. Obinata and K. Okada and M. Inaba
IEEE Robotics and Automation Letters (RAL), 2024
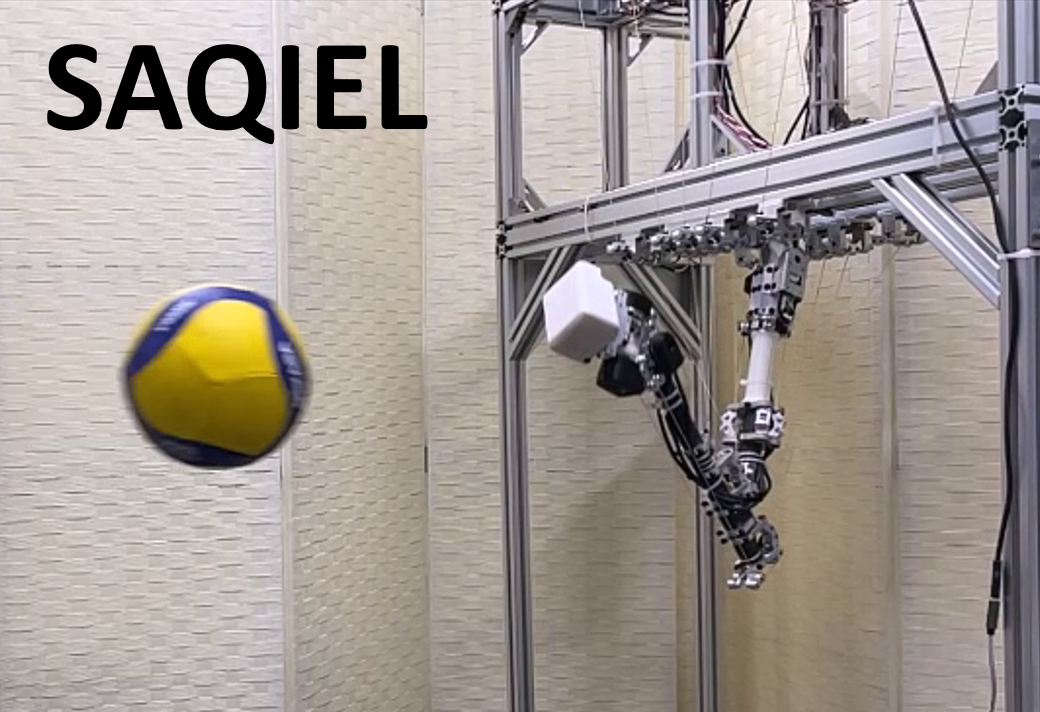
SAQIEL: Ultra-Light and Safe Manipulator with Passive 3D Wire Alignment Mechanism
T. Suzuki and M. Bando and K. Kawaharazuka and K. Okada and M. Inaba
IEEE Robotics and Automation Letters (RAL), 2024
Design Optimization of Wire Arrangement With Variable Relay Points in Numerical Simulation for Tendon-Driven Robots
K. Kawaharazuka and S. Yoshimura and T. Suzuki and K. Okada and M. Inaba
IEEE Robotics and Automation Letters (RAL), 2024

MEVIUS: A Quadruped Robot Easily Constructed through E-Commerce with Sheet Metal Welding and Machining
K. Kawaharazuka and S. Inoue and T. Suzuki and S. Yuzaki and S. Sawaguchi and K. Okada and M. Inaba
2024 IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS2024), 2024
CubiXMusashi: Fusion of Wire-Driven CubiX and Musculoskeletal Humanoid Musashi toward Unlimited Performance
S. Inoue and K. Kawaharazuka and T. Suzuki and S. Yuzaki and Y. Ribayashi and Y. Sahara and K. Okada
2024 IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS2024), 2024
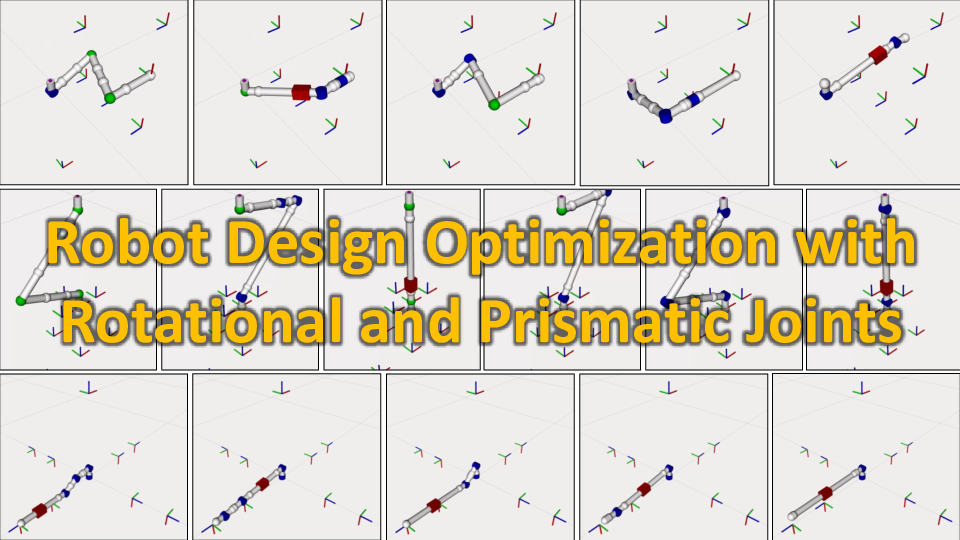
Robot Design Optimization with Rotational and Prismatic Joints Using Black-Box Multi-Objective Optimization
K. Kawaharazuka and K. Okada and M. Inaba
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2024), 2024

CubiX: Portable Wire-Driven Parallel Robot Connecting to and Utilizing the Environment
S. Inoue and K. Kawaharazuka and T. Suzuki and S. Yuzaki and K. Okada and M. Inaba
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2024), 2024
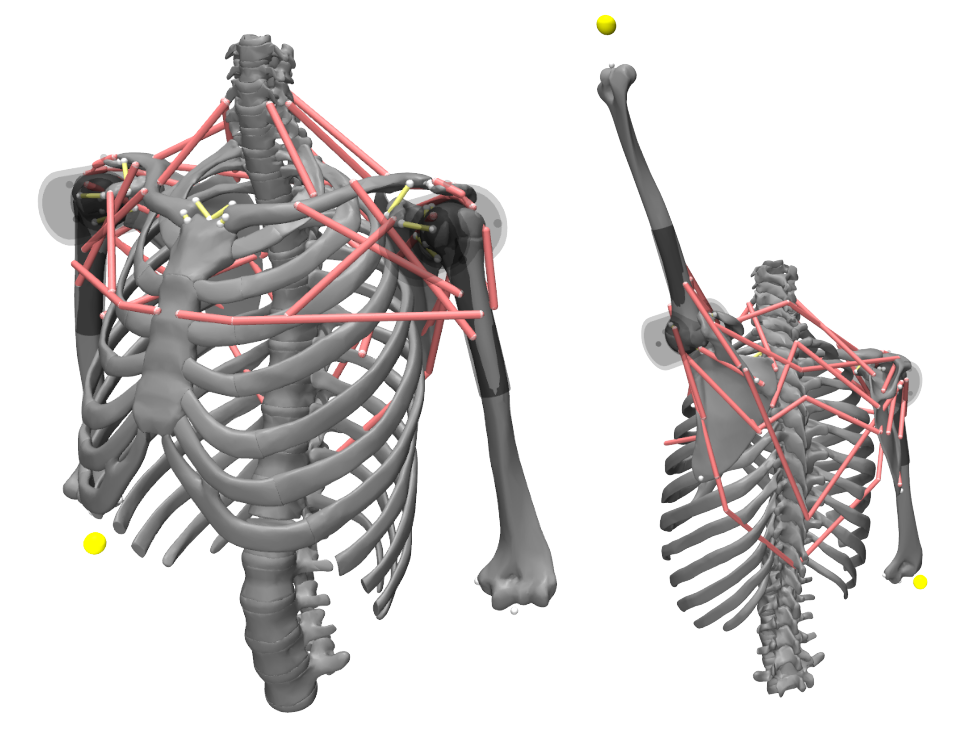
Construction of Musculoskeletal Simulation for Shoulder Complex with Ligaments and Its Validation via Model Predictive Control
Y. Sahara and A. Miki and Y. Ribayashi and S. Yoshimura and K. Kawaharazuka and K. Okada and M. Inaba
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2024), 2024

Robotic Constrained Imitation Learning for the Peg Transfer Task in Fundamentals of Laparoscopic Surgery
K. Kawaharazuka and K. Okada and M. Inaba
2024 IEEE International Conference on Robotics and Automation (ICRA2024), 2024

Adaptive Whole-body Robotic Tool-use Learning on Low-rigidity Plastic-made Humanoids Using Vision and Tactile Sensors
K. Kawaharazuka and K. Okada and M. Inaba
2024 IEEE International Conference on Robotics and Automation (ICRA2024), 2024
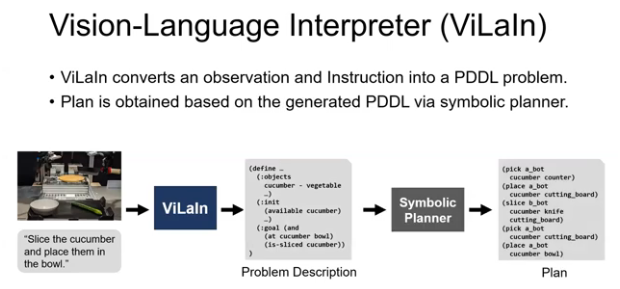
Vision-Language Interpreter for Robot Task Planning
K. Shirai and C. C. Beltran-Hernandez and M. Hamaya and A. Hashimoto and S. Tanaka and K. Kawaharazuka and K. Tanaka and Y. Ushiku and S. Mori
2024 IEEE International Conference on Robotics and Automation (ICRA2024), 2024
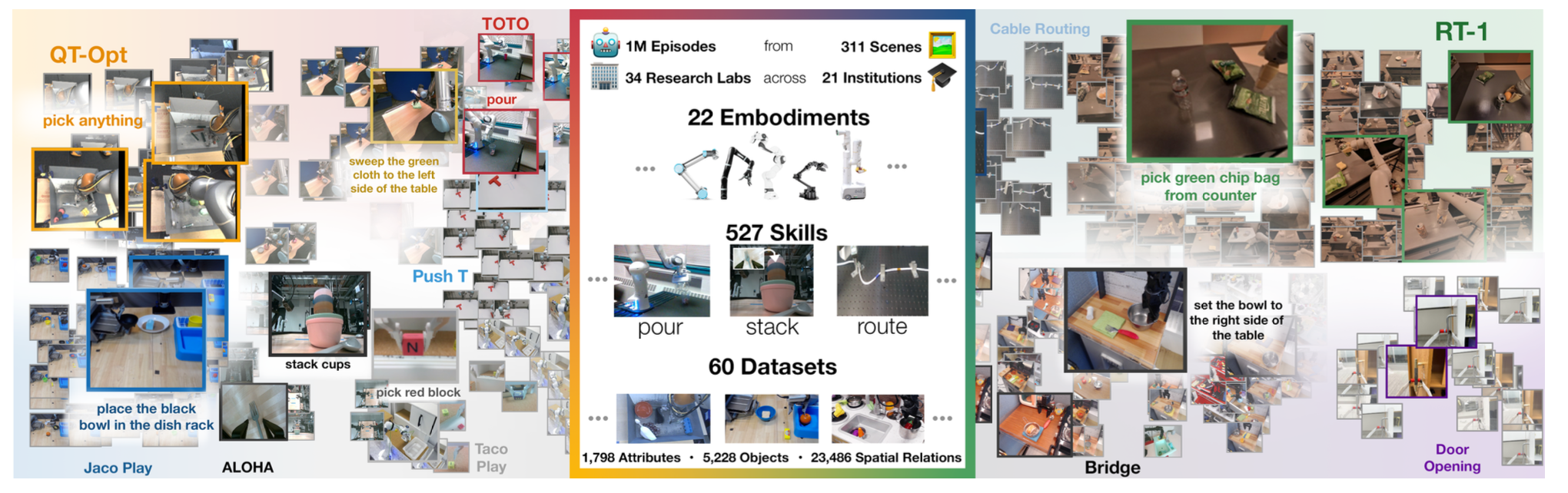
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration
2024 IEEE International Conference on Robotics and Automation (ICRA2024), 2024
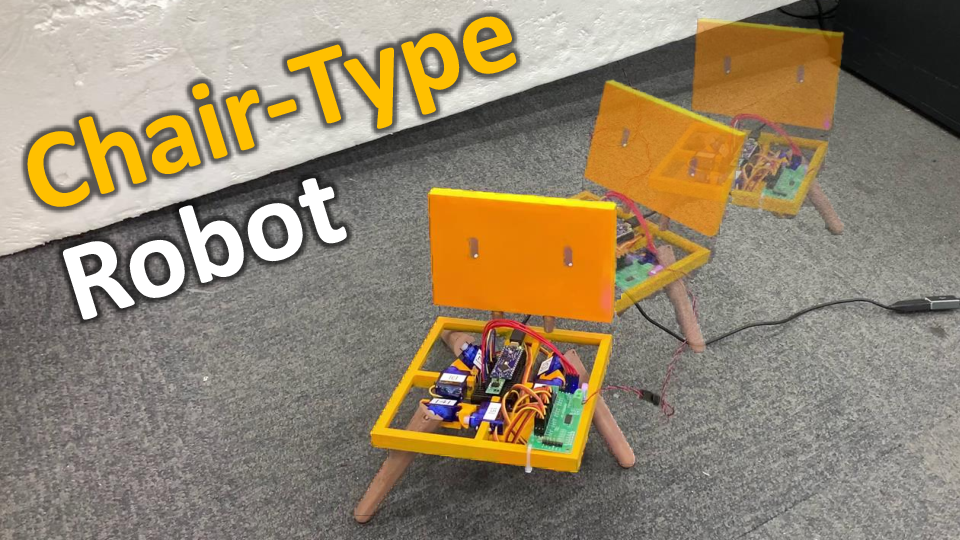
Body Design and Gait Generation of Chair-Type Asymmetrical Tripedal Low-rigidity Robot
S. Inoue and K. Kawaharazuka and K. Okada and M. Inaba
2024 IEEE International Conference on Soft Robotics (ROBOSOFT2024), 2024
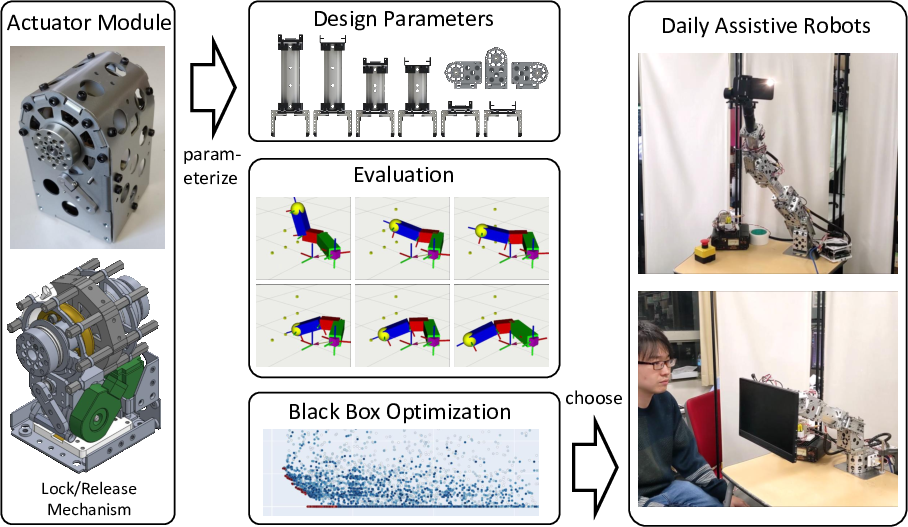
Daily Assistive Modular Robot Design Based on Multi-Objective Black-Box Optimization
K. Kawaharazuka and T. Makabe and K. Okada and M. Inaba
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2023), 2023
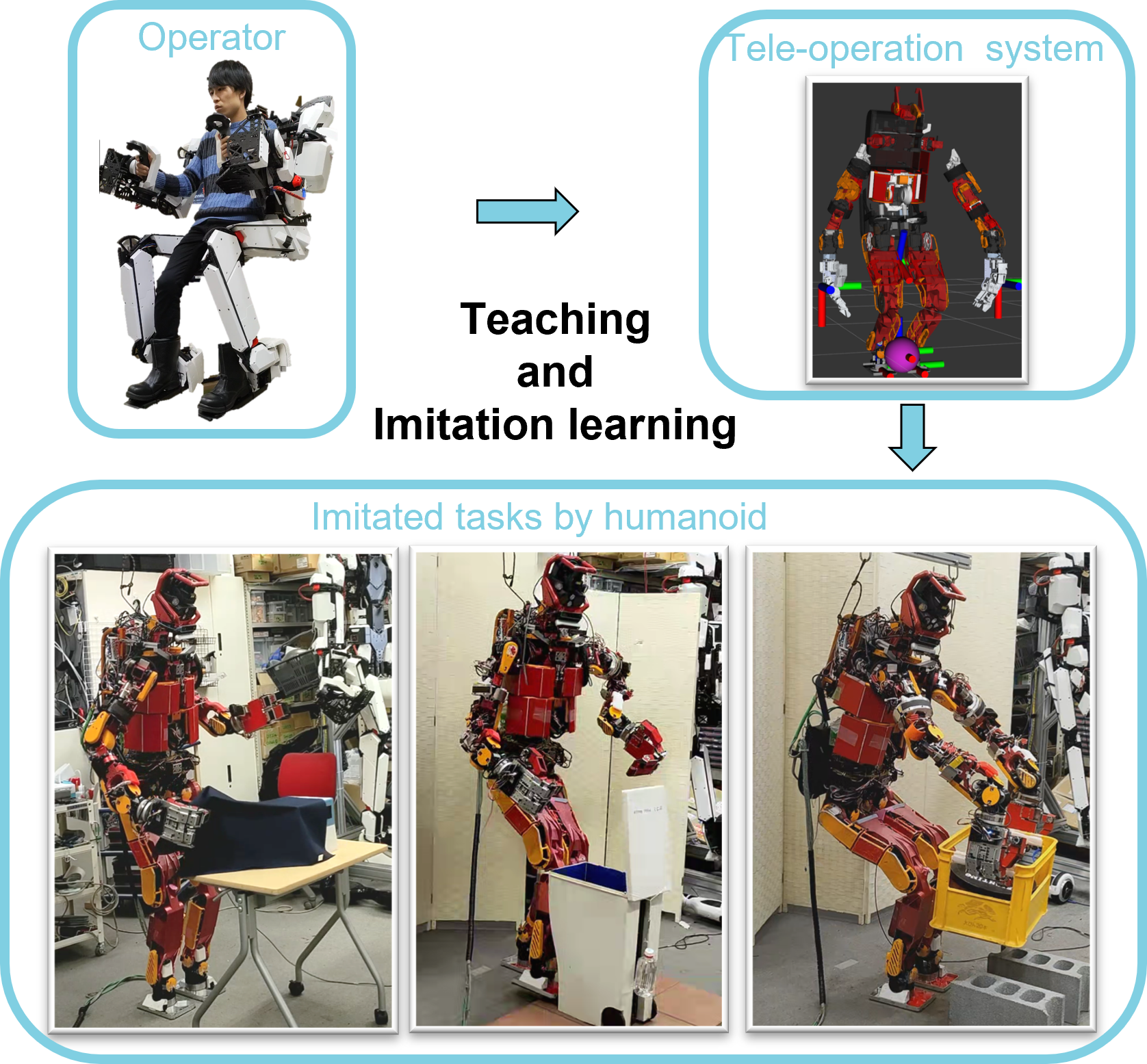
Development of a Whole-Body Work Imitation Learning System by a Biped and Bi-Armed Humanoid
Y. Matsuura and K. Kawaharazuka and N. Hiraoka and K. Kojima and K. Okada and M. Inaba
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2023), 2023
RAMIEL: A Parallel-Wire Driven Monopedal Robot for High and Continuous Jumping
T. Suzuki and Y. Toshimitsu and Y. Nagamatsu and K. Kawaharazuka and A. Miki and Y. Ribayashi and M. Bando and K. Kojima and Y. Kakiuchi and K. Okada and M. Inaba
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2022), 2022